


Researchers have made a breakthrough by creating an AI-enhanced controller for exoskeletons. This smart system learns to support various movements, such as walking and running, without needing individual calibration. The result? Significant energy savings and a promising tool for enhancing human mobility efficiently.
The Evolution of Exoskeletons
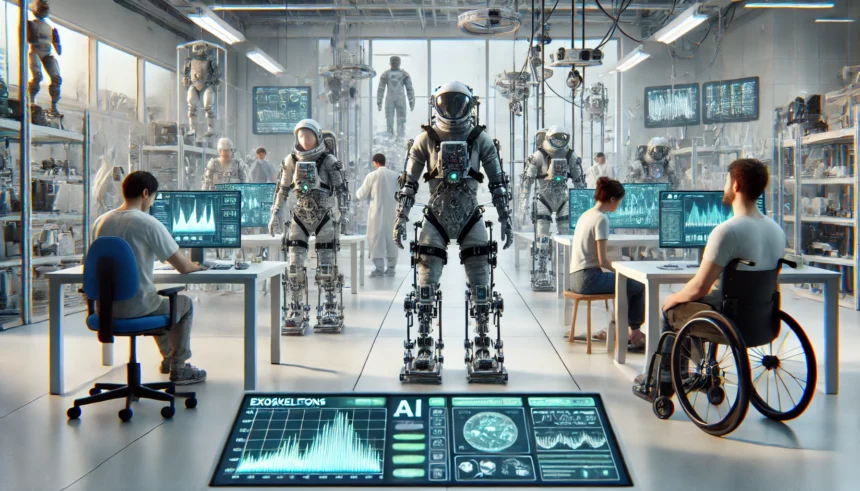
Wearable robotic frameworks, known as exoskeletons, are designed to assist human movement. However, their broader use has been limited due to technological hurdles. Dr. Shuzhen Luo of Embry-Riddle Aeronautical University explains that current exoskeletons require pre-programming for specific activities and individuals. This process involves lengthy, costly, and labor-intensive tests with human subjects.
AI-Powered Control: A Game Changer
Researchers have now developed a “learned” controller using AI and computer simulations. This new system provides smooth, continuous torque assistance for walking, running, or climbing stairs without the need for human-involved testing. Dr. Luo reports that with just one run on a graphics processing unit, they can train a control policy in simulation, making the controller effective for various activities and individuals.
Key Benefits and Features
- Energy Savings: The AI-enhanced controller significantly reduces energy expenditure for wearers. The reductions are:
- Walking: 24.3%
- Running: 13.1%
- Stair Climbing: 15.4%
- Broad Applications: This technology could improve mobility for people with disabilities, enhance safety and efficiency for factory workers, and assist astronauts in space.
Bridging the Simulation-to-Reality Gap
This approach is the first to demonstrate the feasibility of developing controllers in simulation that can significantly improve human performance in reality. Previous reinforcement learning achievements mainly focused on simulation and board games. In contrast, this method uses a dynamic-aware, data-driven reinforcement learning approach to train and control wearable robots, directly benefiting humans.
Overcoming Technological Obstacles
Traditional exoskeletons required handcrafted control laws based on time-consuming human tests to handle each activity and account for differences in individual gaits. The new learning-in-simulation approach overcomes these obstacles, expediting the development of exoskeletons for real-world use.
Future Directions in Exoskeleton Research
Future research will focus on unique gaits for walking, running, or stair climbing to help people with disabilities such as stroke, osteoarthritis, cerebral palsy, and amputations.
Conclusion
This groundbreaking research represents a significant step forward in wearable robot technology. With AI-powered exoskeletons, we are closer to a future where safer, more efficient movements are a reality for everyone, from factory workers to astronauts and people with mobility impairments.
For more information, see the full research paper published in Nature on June 12, 2024. The research was supported by various institutions, including the National Science Foundation and the National Institutes of Health.